

一种控制系统是一个设备管理,命令,指导或调节其他设备的行为的设备系统,以实现所需的结果。换句话说,可以简化控制系统的定义作为控制其他系统以实现所需状态的系统。有各种各样的控制系统的类型,可以大致分类为线性控制系统要么非线性控制系统。下面详细讨论这些类型的控制系统。
线性控制系统
为了理解线性控制系统,我们首先应该了解叠加的原则。原则叠加定理包括两个重要属性,它们如下所述:
同质性:如果我们将系统乘以一些常数A的输入,则输出也将乘以相同的常量值(即a)。
添加性:假设我们有一个系统s,我们正在将输入作为一个1第一次,我们将输出作为b1对应输入a1。在我们第二次给予输入2并且对应于此,我们将输出作为b2。
现在假设这次我们将输入作为先前输入的总和(即a1+ A.2)对应于此输入,假设我们正在将输出作为(b1+ B.2)然后我们可以说系统S遵循添加性的属性。现在我们能够定义线性控制系统作为那些控制系统的类型这遵循均匀性和添加性的原则。
线性控制系统的示例
考虑具有恒定DC源的纯电阻网络。该电路遵循均匀性和增殖性的原理。所有不期望的效果都被忽略并假设网络中每个元素的理想行为,我们说我们会得到线性的电压和当前的特征。这是一个例子线性控制系统。
非线性控制系统
我们可以简单地定义一个非线性控制系统作为一个不遵循均匀性原则的控制系统。在现实生活中,所有控制系统都是非线性系统(直线控制系统实际上只存在)。这描述功能是分析某些非线性控制问题的近似程序。
非线性系统的例子
非线性系统的众所周知的例子是磁化曲线或没有直流机的负载曲线。我们将在此讨论简要讨论DC机器的无负载曲线:没有betway网页版负载曲线给我们气隙通量与现场绕组MMF之间的关系。从下面给出的曲线非常清楚,在开始时,绕组MMF和气隙通量之间存在线性关系,但在此之后,饱和度已经到来,它显示了曲线的非线性行为或特征非线性控制系统。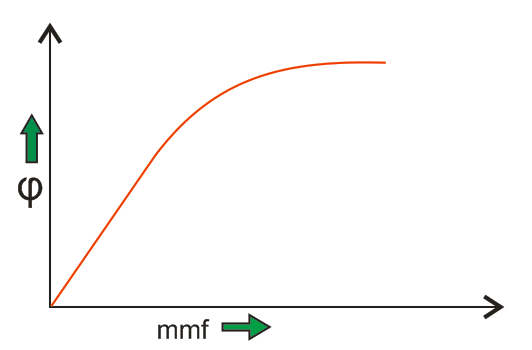
模拟或连续系统
在这些控制系统的类型,我们具有作为系统输入的连续信号。这些信号是时间的连续函数。我们可能有各种连续输入信号的源,如正弦型信号输入源,方形类型的信号输入源;信号可以是连续三角形等的形式。
数字或离散系统
在这些类型的控制系统中,我们具有离散信号(或信号可以是脉冲形式)作为系统的输入。这些信号具有离散的时间间隔。我们可以使用开关将正弦型信号输入源等连续输入信号的各种源转换为正弦型信号输入源,方形类型的信号输入源等。
现在,在模拟系统上存在离散或数字系统的各种优点,这些优点如下:
- 数字系统可以比模拟类型更有效地处理非线性控制系统。
- 与模拟系统相比,离散或数字系统的情况下的电源要求较少。
- 数字系统具有更高的精度速率,与模拟系统相比,可以轻松地执行各种复杂计算。
- 与模拟系统相比,数字系统的可靠性更多。它们还有一个小巧紧凑的尺寸。
- 数字系统在逻辑运算上工作,这些操作多次增加了精度。
- 与模拟系统相比,在离散系统的情况下,损失通常较少。
单输入单输出系统
这些也被称为Siso.系统类型。在此,系统具有单个输出的单个输入。这种系统的各种示例可以包括温度控制,位置控制系统等。
多输入多输出系统
这些也称为MIMO类型的系统。在此,系统具有多个输入的多个输出。这种系统的各种示例可以包括PLC型系统等。
总参数系统
在这些类型的控制系统中,各种各样的主动和被动组件假设集中在一个点,这就是为什么这些被称为集总参数类型的系统。对这种类型的系统的分析非常容易,包括微分方程。
分布式参数系统
在这些类型的控制系统中那各种活跃(如电感器和电容器)和被动参数(电阻器假设沿长度均匀地分发,这就是为什么这些称为分布式参数类型的系统。对这种类型的系统的分析略微困难,其包括部分微分方程。


")

