

伺服电机驱动器可用于控制单个伺服甚至一组伺服电机。在伺服电机控制是要完成任务的主干的许多项目中,控制器必须驱动多个伺服。其中一个例子是RC飞机,它使用许多伺服。
基本组成部分
- 微控制器
- 电源单元
杂项组成部分
- 一种电位计
- 连接器,电线等
微控制器
一种伺服电机通过应用来驱动电压通知它定期间隔。伺服对定时变化很敏感。必须以特定时间间隔应用特定宽度的脉冲。通常,脉冲持续时间从0ms变化到2.2ms,重复率为50Hz至60Hz。对于精确的位置控制,所选的控制器必须具有具有所需分辨率的定时器。此外,如果必须同时控制多个电机,则处理器时钟必须足够快。对于单个电机控制,8051可以像AT89S51或P89V51RD2一样使用。但对于多个电机来说,我们必须使用PIC,如PIC18F或ATMEGA,因此可以使用它的内部PWM。但是,微控制器的选择完全取决于设计者和项目要求。
电源
电源单元伺服电机控制器的设计取决于与电路板接口的伺服电机数量。伺服电机从4.8V运行到6V电源电压。典型值为5V。施加大于电源电压的电压不可建议,因为它可能使电机永久无用。电机的当前凹槽是可变的,取决于它产生的扭矩。此外,它将在空闲模式下绘制更少的电流,并且在运行时的最新电流。伺服电机最大电流绘制作为其失速电流。这是在由于过载引起的最大扭矩之前运行时,它将绘制的最大电流。该电流值可以高达某些电机的1 A.
用于单个电机控制,a电压调节器与LM317一样可以与合适的散热器一起使用。但是当需要接地多个电机时,必须使用高质量的电流等级。SMPS(开关模式电源)可以是一个很好的选择。
框图下图 - 在伺服电机驱动器中显示互连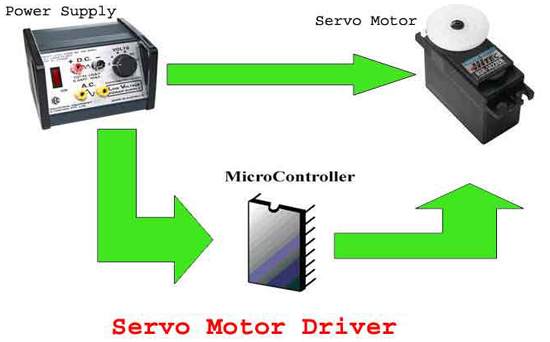
控制伺服电机
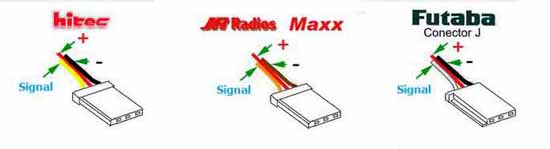
伺服电机有三个终端。
- 位置信号(PWM脉冲)
- V.CC.(从电源)
- 地面
通过施加特定宽度的PWM脉冲来控制伺服电动机角位置。脉冲持续时间从约0.5ms变化为0度旋转到2.2ms,以保持180度旋转。需要在约50Hz至60Hz的频率下给出脉冲。
为了生成PWM(脉冲宽度调制)波形,如下图所示,可以使用微控制器的内部PWM模块或可以使用定时器。使用PWM块作为大多数微控制器系列设计更灵活,此PWM块更好适合应用程序的需求伺服电机。对于PWM脉冲的不同宽度,我们需要相应地编程内部寄存器。
现在,我们还需要告诉微控制器它必须旋转多少。为此目的,我们可以使用简单的电位计,并使用ADC获得旋转角度或更复杂的应用,可以使用加速度计。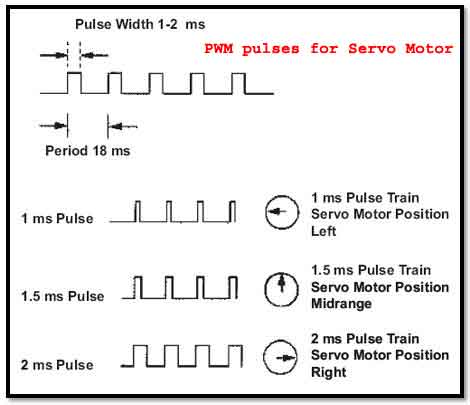
程序算法
让我们设计用于控制单个伺服的程序,并且通过连接到控制器引脚的电位器给出位置输入。
- Nitialize用于输入/输出的端口引脚。
- 读取ADC以获得所需的伺服位置。
- 为所需值进行编程PWM寄存器。
一旦触发PWM模块,所选的PWM通道引脚将高(逻辑1),并且达到所需的宽度后,它将再次低至(逻辑0)。因此,在触发PWM后,必须启动一个延迟约19毫秒的计时器,并等到计时器溢出 - 转到步骤2
您可以使用各种PWM模式,您可以根据您选择的微控制器使用。在代码中应在某种程度上进行一定程度的优化来控制伺服。
如果您计划使用多个伺服,而不是您需要的PWM频道。每个伺服可以顺序地给出PWM信号。但是,必须保留每个伺服的脉冲重复率。否则伺服将不得不脱离同步。
笔记 :
如果你计划制作自己的董事会伺服电机控制器,为携带电流带到伺服的轨道提供适当的厚度。必须遵循适当的ERC和DRC规则检查。用于连续旋转伺服的PWM信号与180度伺服的PWM信号不相同。应为此类电机咨询伺服数据表。
伺服电机对电压波动至关重要,电压太高可能会损坏内部反馈控制电路。因此,电源必须彻底设计为伺服规格并在部署前检查。如有必要,必须使用散热器。


")

