

我们知道GydF4y2Ba感应式电能表GydF4y2Ba,为了保持旋转速度与功率“的电源”电源之间的相位角度GydF4y2Ba电压GydF4y2Ba而压力线圈的通量应该等于90GydF4y2BaO.GydF4y2Ba“。但是在实际实践中,电源电压和压力线圈通量之间的角度正不是90GydF4y2BaO.GydF4y2Ba但小程度较少。因此,一些滞后调节装置用于调节滞后角。让我们考虑旁边给出的数字:GydF4y2Ba

在旁边的图中,我们已经引入了另一个线圈,该线圈位于中心肢体上,该线圈等于N的匝数。该线圈称为滞后线圈。当我们向压力线圈提供电源电压时,它会产生通量F.现在GydF4y2Ba通量GydF4y2Ba分为两部分FGydF4y2BaP.GydF4y2Ba和F.GydF4y2BaGGydF4y2Ba, FGydF4y2BaP.GydF4y2Ba磁通切断移动盘并与滞后线圈连接。由于滞后线圈,有一个EMF eGydF4y2BaL.GydF4y2Ba哪个滞后于FGydF4y2BaP.GydF4y2Ba按角度为90GydF4y2BaO.GydF4y2Ba,也是我GydF4y2BaL.GydF4y2Ba答案:EGydF4y2BaL.GydF4y2Ba一定数量的90GydF4y2BaO.GydF4y2Ba.滞后线圈产生磁通FGydF4y2BaL.GydF4y2Ba.由此得到的切割动盘的合力通量是F的总和GydF4y2BaL.GydF4y2Ba和F.GydF4y2BaP.GydF4y2Ba.此时该磁通的合力值与滞后线圈或遮阳线圈的合力磁动势是一致的,遮阳线圈的合力磁动势可以通过两种方法进行调整GydF4y2Ba
- 通过调整电气GydF4y2Ba抵抗性GydF4y2Ba.GydF4y2Ba
- 通过调整着色带。GydF4y2Ba
让我们更详细地讨论这些点:GydF4y2Ba
(1)钢圈电阻的调节:GydF4y2Ba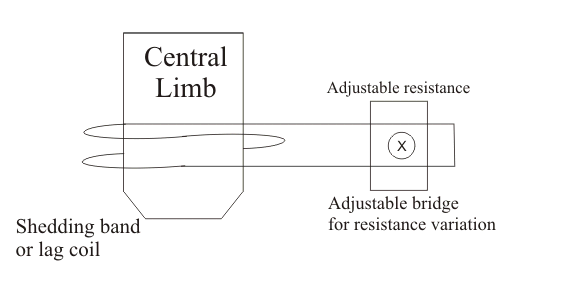
如果GydF4y2Ba电阻GydF4y2Ba在线圈上很高GydF4y2Ba当前的GydF4y2Ba将低,因此线圈的MMF降低,因此滞后角也降低。因此,我们必须降低电阻,并且通过在线圈中使用厚线可以降低电阻。因此,通过调节电阻,我们可以间接调整滞后角。GydF4y2Ba
(2)通过在中心肢体上向上和向下调节阴影带,我们可以调整滞后角,因为当我们向上移动遮阳带时,它们拥抱更多的助焊剂,因此诱导的EMF增加,因此MMF随着滞后角的增加而增加。当我们向下移动遮阳带时,它将接受较少的助焊剂,因此诱导的EMF将降低,因此MMF随着滞后角的值而降低。因此,通过调整遮光带的位置,我们可以调整滞后角。GydF4y2Ba
摩擦补偿GydF4y2Ba
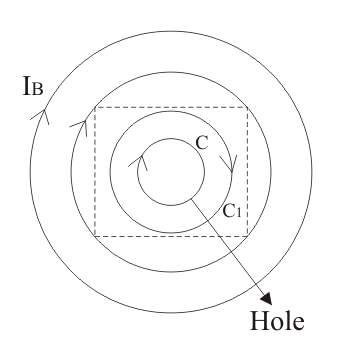
为了补偿摩擦力,我们必须向圆盘的转动方向施加一个小的力。该作用力应与负载无关,以便在轻负载时也能正确读数。但是摩擦力的过度补偿会导致爬行。爬行可以定义为在没有电流流过电流线圈的情况下,仅通过激励压力线圈而使盘片连续旋转。为了避免爬行,在圆盘上钻了两个完全相反的孔。因此,有效的通告GydF4y2Ba涡流GydF4y2Ba如图所示,光盘的路径扭曲。还将有效涡流路径的中心移位到C.GydF4y2Ba1GydF4y2Ba来自C.现在C.GydF4y2Ba1GydF4y2Ba成为由这些涡流产生的等效磁极,因此旋转盘上的净力将倾向于移动C.GydF4y2Ba1GydF4y2Ba从极轴C进一步远离杆C.圆盘将蠕动直到钻孔到达杆的边缘附近,然而,盘的进一步旋转是通过上述机构产生的相反扭矩而相对的。GydF4y2Ba
过载补偿GydF4y2Ba
在负载条件下,阀瓣连续移动。因此产生了一个由于旋转而产生的电动势,称为动态感应电动势。由于这个电动势产生的涡流与系列相互作用GydF4y2Ba磁场GydF4y2Ba产生制动扭矩。现在这GydF4y2BabreakGydF4y2Ba扭矩与电流平方成正比,因此它连续增加并反对盘的旋转。为了避免产生这种自打破扭矩,盘的全负载速度尽可能低,使得可以减小自打破扭矩。单相能量表中的错误:由系统(即驾驶和制动)引起的错误如下写入:GydF4y2Ba
驱动系统引起的错误GydF4y2Ba
- 磁路非对称引起的误差GydF4y2Ba
如果是GydF4y2Ba磁路GydF4y2Ba由于米蠕变,不对称地产生驱动扭矩。GydF4y2Ba - 由于错误相位角错误GydF4y2Ba
如果各个相量之间没有适当的相位差,则它会导致光盘的旋转不当。相位角度不正确的滞后调节,电阻的变化或其可能是由于电源电压的异常频率。GydF4y2Ba - 由于错误的磁通大小造成的误差GydF4y2Ba
造成磁通量错误的原因有很多,其中电流和电压值异常是主要原因。GydF4y2Ba


")

